

Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
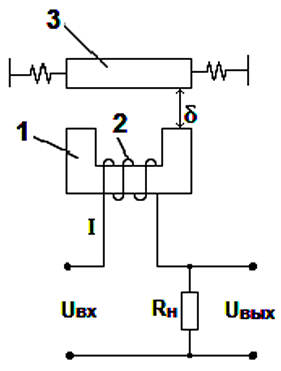
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:
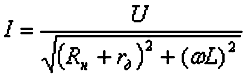
L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
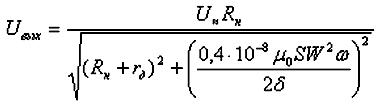
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:
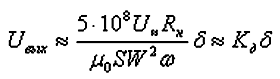
На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).

Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей. Поэтому прибор определяет ток разности I1-I2, который определен функцией перемещения якоря от средней позиции. Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со схемой выпрямления (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры
- Одним из параметров индуктивных датчиков является диапазон срабатывания. По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов. Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
- На практике при подборе датчика важны два показателя интервала срабатывания:
— Полезный.
— Эффективный.
Показания первого вычисляются как +10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания. Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис, который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток. Изготовители иногда производят датчики специального исполнения на 500 миллиампер.
- Частота отклика. Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Методы подключения на схемах
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.

- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики. У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
Цветовая маркировка
Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешности
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком. Суммарная погрешность состоит из множества различных погрешностей:
- Электромагнитная погрешность является случайной величиной. Она появляется вследствие индуцирования ЭДС в катушке датчика наружными магнитными полями. На производстве возле силовых электрических устройств существуют магнитные поля чаще всего частотой 50 герц.
- Погрешность от температуры также является случайным значением, так как работа большого количества элементов датчика зависит от температуры и является значительной величиной, учитываемой при проектировании датчиков.
- Погрешность магнитной упругости. Она появляется от нестабильности деформаций сердечника при сборке прибора, а также из-за изменения деформаций при работе. Влияние нестабильности напряжений в магнитопроводе образует нестабильность сигнала на выходе.
- Погрешности устройства появляются по причине влияния измеряющей силы на деформации элементов датчика, а также влияния скачка усилия измерения на нестабильность деформации. Также на погрешность влияют люфты и зазоры в подвижных частях конструкции датчика.
Погрешность кабеля образуется от непостоянной величины сопротивления, деформации кабеля и его температуры, наводок электродвижущей силы в кабеле от внешних полей.
- Тензометрическая погрешность случайная величина и зависит от качества намотки витков провода. При намотке возникают механические напряжения, изменение которых при функционировании датчика приводит к изменению сопротивления обмотки постоянному току, а значит, изменению сигнала на выходе. Чаще всего в качественных датчиках эту погрешность не учитывают.
- Погрешность старения датчика появляется от износа движущихся частей устройства датчика, а также постоянного изменения электромагнитных свойств магнитопровода. Такую погрешность считают также случайным значением. При определении погрешности износа учитывается кинематика устройства датчика. При проектировании датчика рекомендуется определять его срок эксплуатации в нормальном режиме, за период которого погрешность от износа не превзойдет заданного значения.
- Погрешность технологии появляется при отклонениях от техпроцесса изготовления датчика, разброса параметров катушек и элементов при сборке, от влияния натягов и зазоров при сопряжении деталей. Оценка погрешности технологии производится простыми механическими измерителями.
Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.
Достоинства
- Большая чувствительность.
- Повышенная мощность выхода, до нескольких десятков Вт.
- Возможность подключения к промышленным источникам частоты.
- Прочное и простое устройство.
- Нет трущихся контактов.
Недостатки
- Способны функционировать только на переменном напряжении.
- Стабильность питания и частота влияют на точность работы датчика.
Сфера использования
- Медицинские аппараты.
- Бытовая техника.
- Автомобильная промышленность.
- Робототехническое оборудование.
- Промышленная техника регулирования и измерения.
Похожие темы:
- Емкостные датчики. Виды и устройство. Работа и применение
- Датчики Холла. Виды и применения. Работа и подключения
- Тензометрические датчики (Тензодатчики). Виды и работа. Устройство
- Датчики давления. Виды и работа. Как выбрать и применение
- Ультразвуковые датчики часть 1. Устройство и работа
- Ультразвуковые датчики часть 2. Типы и работа. Применение
- Дифференциальные трансформаторы (ДТ). Виды и особенности
- Кондуктометрические датчики. Виды и работа. Применение
- Бесконтактные датчики (БД). Виды и применение. Особенности